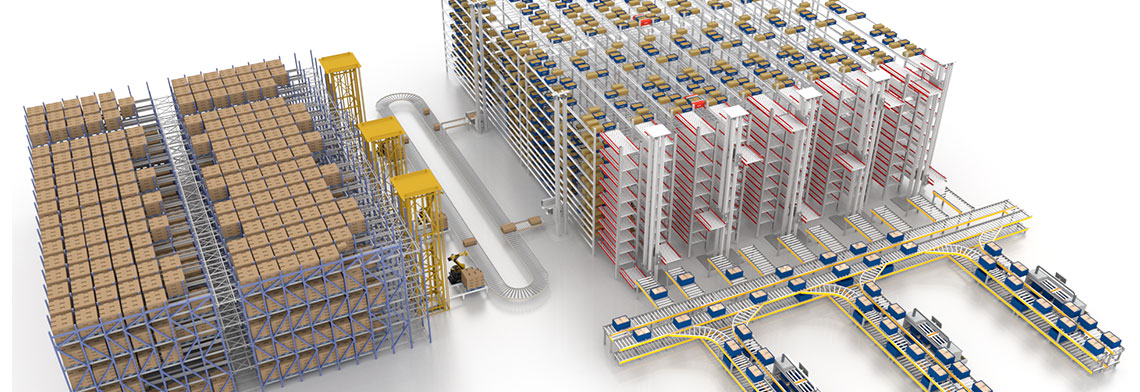
四向托盘穿梭车是一种智能机器人,可通过编程实现在立体库上以托盘为单位对货物进行托取、运送、放置等操作,并可与上位机或WMS系统进行通讯,结合RFID、条码识别等物流信息技术,实现货品自动化识、连续存取、自动理货等功能。
特点
原地换向:动轮分布合理,运行至指定位置,原地换轨
多车调度:自主规划路径,多车排斥, 多车调度中出入库
自动充电:车体自我检测,自动导向至充电点
障碍感知:多传感器配合导航 / 系统实时监控